Reaction Wheel for Active Roll Control
As an independent project to be counted towards the aerospace concentration portion of my mechanical engineering degree, I designed, prototyped, and tested this reaction wheel with the goal of securing it inside a high power rocket to control its roll axis during flight.
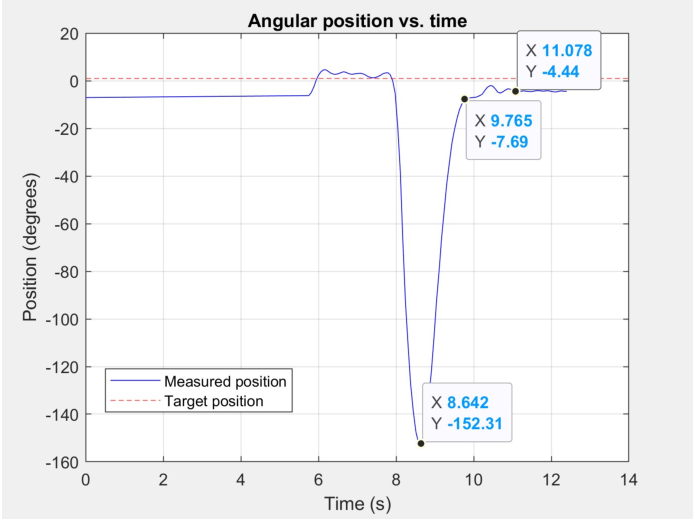
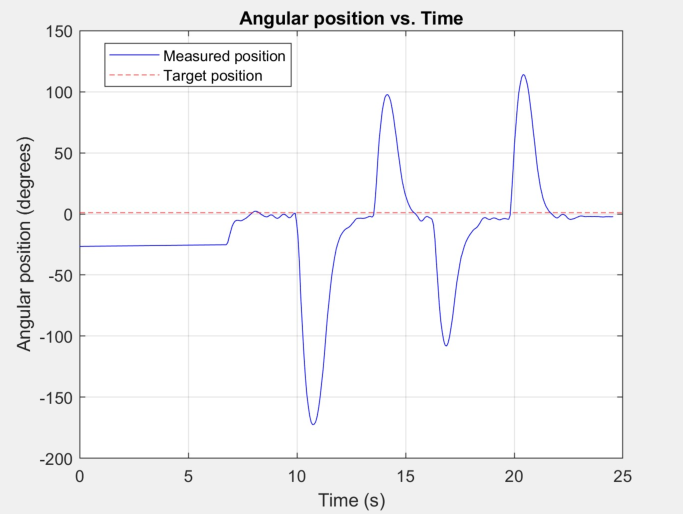
The reaction wheel utilizes a proportional-integral-derivative (PID) closed-loop feedback controller to control the angular position of the system it’s attached to by continually adjusting the PWM frequency sent to a DC motor depending on the measured angular position from an IMU. The angular position of the system over time was logged and sent to a computer via bluetooth. Finally, a MATLAB program was used to parse the recieved data and generate plots. The below images and text give a good summary of the success of the prototype.