Overview
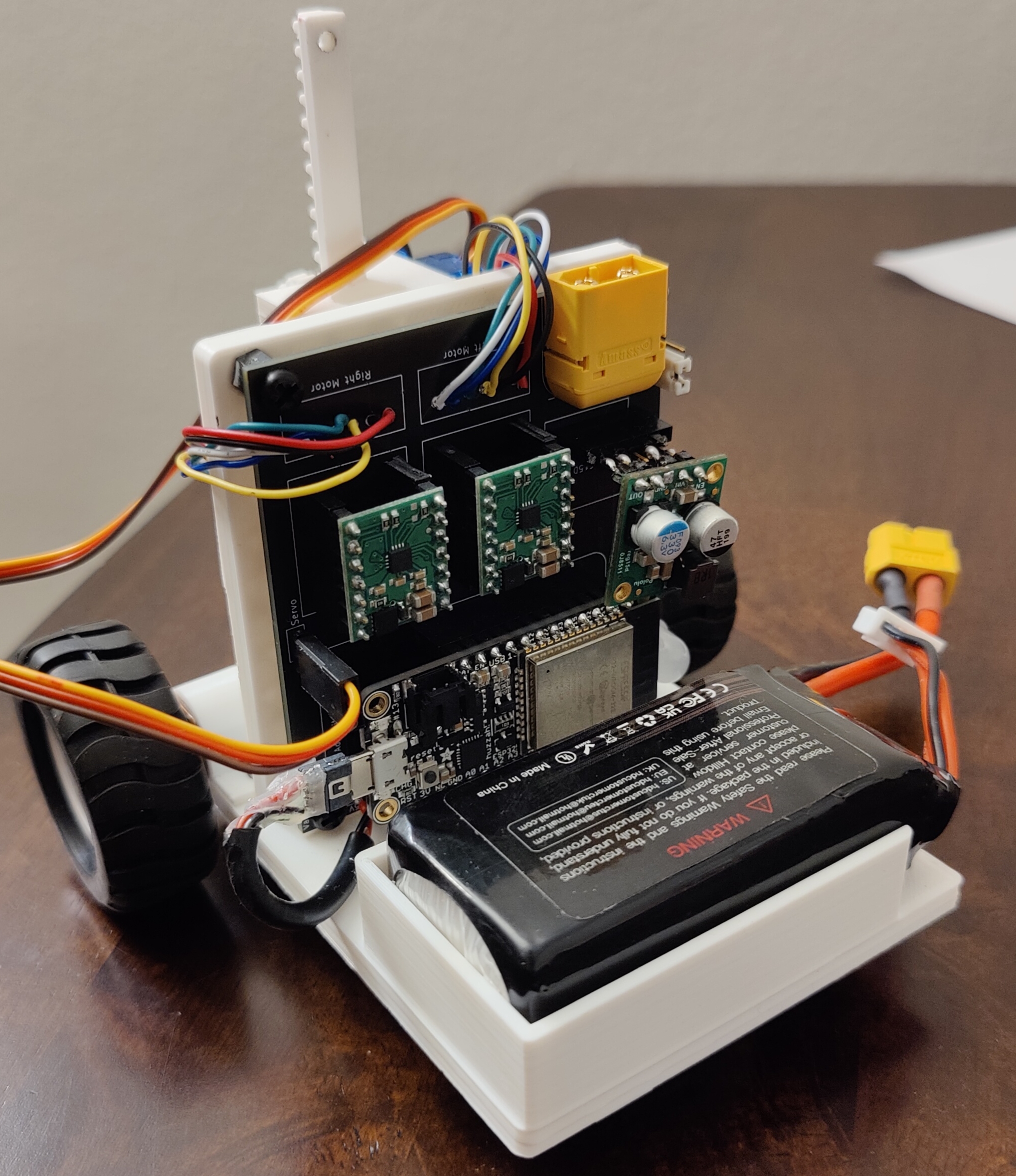
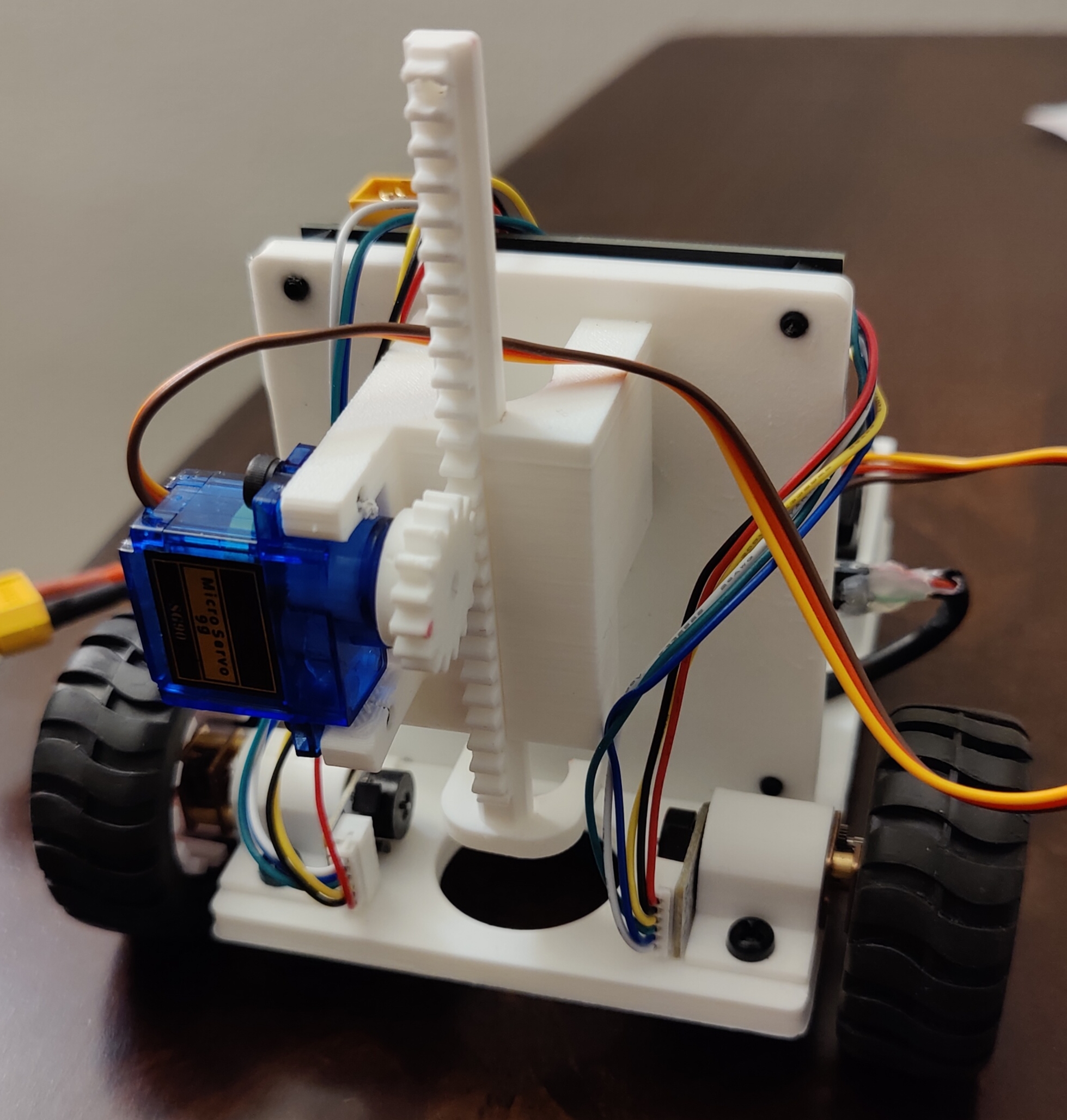
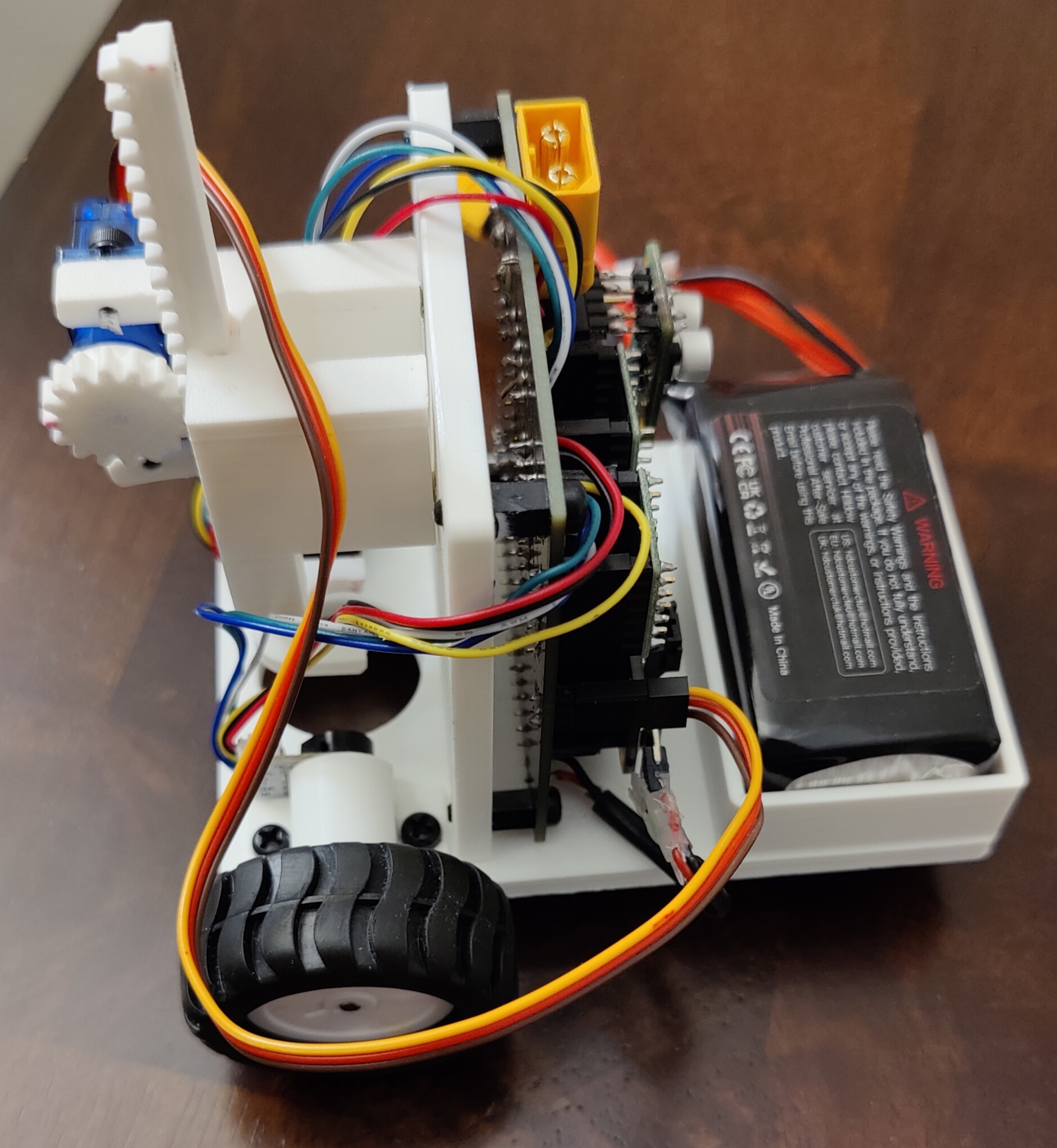
VanGo is a differential drive robot for drawing SVG images. Put simply, VanGo is a wheeled mobile robot capable of trajectory tracking, with the added feature that the trajectory is generated from an SVG image and the robot holds a marker which is brought into contact with the page while the robot is on the desired path, thus drawing the SVG image.
Usage
A basic explanation of how VanGo is used and what goes on under-the-hood during general use is explained below. More in-depth explaination can be found is later sections of this site.
- The user produces a CSV file containing (x,y) points from a SVG image using Coordinator
- The user starts the
vango-clientprogram, providing the CSV file - A path of waypoints is generated from the CSV file and clustered into closed curves based on some threshold distance
- The robot will navigate to the first point in the next closed curve
- Lower the marker, then navigate to each additional point in the same closed curve
- After passing through all the points in this closed curve, raise the marker and go back to step 4.