Performance
In its current stage, the VanGo drawing robot does not work well enough to draw consistent and accurace images, however with additional tuning, a more sophisticated trajectory tracking algorithm, and possibly additional sensors, the performance will improve. Manual mode, which enables a user to manually drive the robot and move the marker up and down works as desired. Below the results of several tests are shown.
Test 1: Manual Mode "Hi"
In the video linked below, I manually controlled the robot using the vango-client
application to write "Hi". This worked fairly well, but as you can see, driving the robot
smoothly with the current controls is a bit challenging.
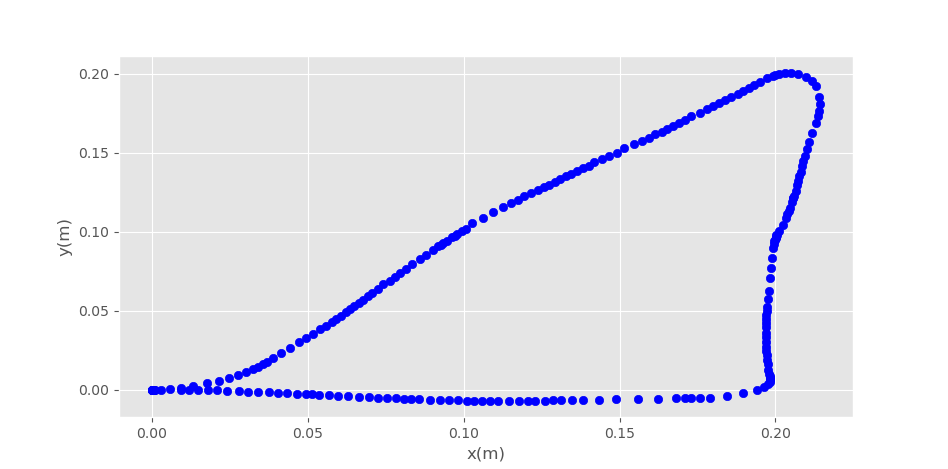
Test 2: Automatic Mode "Triangle"
The video linked below performs a test of the robot in automatically mode attempting to draw a triangle. There is also a plot of the estimated x and y position of the robot from wheel odometry. As you can see the actual position of the robot is not very good, however the position estimate from odometry appears to be a bit better. This could potentially be due to wheel slipping.